
|
|
文章詳情
限位器式點位控制工業機器人工作原理和結構特點 二維碼
1099
實現限位器式點位控制方法的控制裝置是最簡單的點位控制裝置,一般都稱為循環式控制裝置。 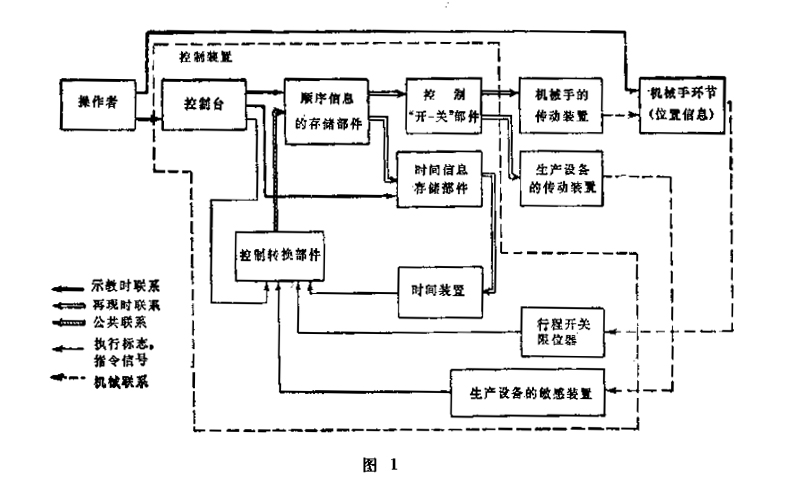 限位器式點位控制工業機器人的原理圖如圖1所示。此時,存儲器通常是由順序信息、位置信息和時間信息的分立存儲部件組成的。分離出位置信息是按限位器定位的機器人機械手的結構特點。以限位器的一定位置或者機械手各環節的行程開關的標志形式存儲位置信息。用轉接元件和由許多轉接元件組成的部件存儲順序信息,其中有;插孔版(“阿依達”型、ПР-10И型、旋風3Б型機器人),程序鼓(帶有穿孔卡的程序鼓的СМТ-1000型機器人),插頭(“電勒克司”公司的控制裝置),多位轉換開關(МП-5、МП-9型機器人)和翻轉開關等等。常用電位計給出時間信息,并用繼電器式的時間裝置或用類似的部件的部件加以處理。 在循環控制裝置中,控制位置的部件向機械手各環節的傳動裝置和加工設備的傳動裝置發出“開-關”指令。通常是用有觸點和無觸點的繼電器構成這種控制位置的部件。由各種轉換元件(如步進選擇器、帶譯碼器的計數器、移位寄存器等等)構成控制轉換的部件。 在編制機器人程序時,操作者輸入各環節位置的信息(將機器人機械手的環節上的限位器或行程開關的標桿移到要求位置處),并把執行程序時的順序信息和延遲時間的大小存入控制裝置中。執行程序時,要將完成單元操作的順序的信息加到“開-關”控制部件中去。該部件接通和斷開機械手的各環節和生產設備的傳動裝置,以便保證環節的運動與預先編制的程序順序相對應。用自然數碼對每一個環節的要求位移和實際位移進行比較。比較元件可以是傳感器或者是機械限位器。對于前一種情況,當要求位移與實際位移一致時,傳感器給出標志轉換到執行下一步的信號;而在后一種情況下,根據時間裝置給出的信號轉換到執行下一步程序。當所有環節到達由程序段給定的位置時,從傳感器或由時間裝置得到的信號加到控制轉換部件中,控制轉換部件產生轉向下一步的信號等等。  |

臺州捷眾智能裝備有限公司 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: m.gzfc168.cn 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾智能裝備阿里巴巴 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: jiezhongcnc.1688.com 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾微信公眾號 |  掃一掃手機網站 |