
|
|
文章詳情
具有點位和輪廓控制的機器人機械手液壓系統設計 二維碼
649
點位和輪廓控制的液壓機器人機械手采用電液伺服傳動裝置。以УМ-1機器人的傳動裝置為例,給出了這種傳動裝置的原理圖及其說明。目前在具有液壓伺服系統的機器人中,采用多個單一坐標的伺服傳動裝置。 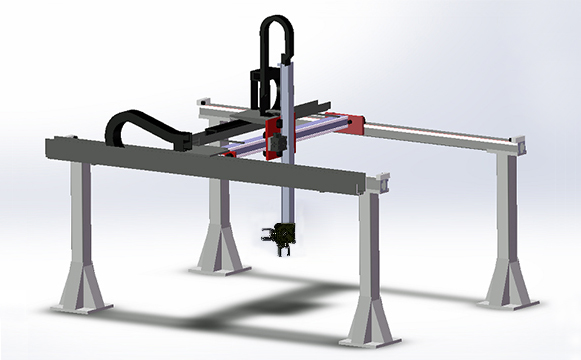 機器人的每一個運動自由度的運動都有一個單一伺服傳動裝置來實現。這時,可用節流控制、容積控制和節流-容積控制方法控制液壓馬達的運動速度。在容積-節流控制時,用節流過液壓放大器工作縫隙流量的方法改變進入液壓執行馬達的液體體積,并能根據壓力值自動調節為傳動裝置供壓的泵的工作容積。 具有點位和輪廓控制的機器人[УМ-1型和“塔里伐”(Τραπbφα)型機器人]的液壓放大器,以及具有循環控制的機器人的液壓系統,是由液壓執行馬達、配流裝置和液壓泵站組成的。在使用節流控制和容積-節流控制方法控制速度時,是以節流閥作為配流裝置實現控制的,而在采用容積方法控制速度時,是用變量泵實現控制的。 具有點位和輪廓控制機器人的液壓系統結構參數初步數值的確定同具有循環控制的按繼電作用原理構成的液壓系統是一樣的。下面分析液壓傳動裝置的靜態和動態特征,下列特性屬于靜特性,負載特性,就是速度隨負載變化的關系(例如流徑節流閥縫隙的液體流量隨輸出的壓力而變化);功率和效率隨工作條件變化的關系。機器人液壓伺服傳動裝置的動力學特性決定于精度、快速性和穩定性儲備。 實驗研究表明,機器人液壓伺服系統在本質上是非線性系統,,但是在實際計算工業機器人機械手液壓伺服傳動裝置的各環節時,作為一次近似,可以用大家熟知的線性化方法所獲得的線性方程來描述它。 計算機上述的傳動裝置的一般步驟如下: (1)用類似于計算繼電式傳動裝置的方法,對機器人液壓伺服傳動裝置進行初步靜態計算,在此基礎上,確定傳動裝置的液體壓力和流量,以及馬達和管道的初步結構參數。 (2)選擇配流元件,即節流閥(電液放大器)。略型節流閥是在蘇聯所生產的機器人傳動裝置用的電液放大器中質量**的。 (3)確定反饋傳感器。機器人機械手伺服傳動裝置設計經驗表明,反饋傳感器的誤差應不大于伺服系統允許的靜態誤差的20~30%。 (4)確定傳動裝置的傳遞函數略。 (5)研究傳動裝置的穩定性略,并且在必要的情況選擇校正裝置。所研究的傳動裝置中主要校正形式是串聯校正。 (6)研究過渡過程品質。  |

臺州捷眾智能裝備有限公司 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: m.gzfc168.cn 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾智能裝備阿里巴巴 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: jiezhongcnc.1688.com 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾微信公眾號 |  掃一掃手機網站 |