
|
|
文章詳情
機械手傳感器的選擇及各類傳感器的主要功能作用 二維碼
2124
在選擇傳感器種類時,除要考慮傳感器主要參數和結構外,還要考慮電源問題,傳感器和控制裝置聯結問題,信號預處理問題等。 用電位計作為位置傳感器組成機器人機械手控制系統的測量部分,這是最簡單的了。在這種情況下,用直流電源(穩壓)供電。用兩根導線使傳感器與控制裝置相連。傳感器輸出信號的功率足夠大,所以信號通常不需要再進行處理。電位計在最簡單的點位控制系統中應用很廣。薄膜電位計很有使用前途。它的壽命長,可轉到5億圈還不壞。并且它的分辨率高。 數碼變換器。例如光電數碼變換器,在對信息進行數字處理的控制裝置得到了應用,并且它有很高的測量精度。變換器用n+3根導線和控制裝置相連,n為變換器的位數。傳感器的輸出信號通常需要進行放大。數碼變換器價格昂貴,所以復雜的工業機器人的控制系統中才使用它。 現代工業機器人使用自整角機和旋轉變壓器是非常有發展前途的。這兩種傳感器分辨率高、抗干擾性好、外形尺寸小。高精度點位控制機器人機械手可使用雙讀數旋轉變壓器。以此為主體構成軸-模擬量-數碼測量變換器,可以代替在對信息進行數字處理的控制裝置中使用的數碼變換器。由該變換器得出的信號。用5~7根導線輸出,而且不需要再進行放大。用頻率為400赫茲、正弦波形、非線性小于0.5%的專用電源供電。 因需要有專用電源和模擬量-數碼變換器,就使系統的測量部分復雜了。但是假若合理地組成控制裝置,控制系統的整個測量部分實際上可以簡化。所以在數字模擬控制裝置中(由列寧格勒加里寧工學院控制技術研究室研制的),當執行程序時,使用旋轉變壓器的信號。這信號在簡單的軸-相位-時間區間變換器上交換成時城信號。在示教機器人時,用一個由計算器實現的時間區間-數碼變換器,連續不斷地把信號變成數碼(不要協調讀數)。結果使控制系統的裝置相當簡單,且價格便宜。 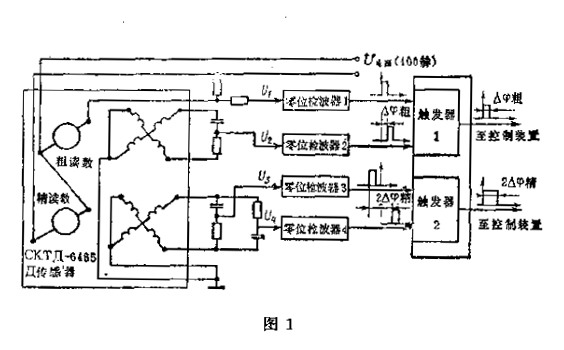 軸-相位-時間區間變換器如圖1所示。變換器包括有CKT-6465型雙讀數正-余弦變壓器、R-C移相電路、零位檢波器以及兩個觸發器。粗讀數正弦波電壓U?、U?和精讀數正弦波電壓U?、U4加給零位裝置。由U?和U?、U?和U4電壓相位差可確定傳感器轉軸位置。粗讀數用電壓源U?作為基準電壓。在精讀數通道中,由U?與U4電壓向相反方向的相位偏移,形成相位差。精讀數電路保證有很高的測量穩定性。零位裝置把正弦電壓變換成矩形脈沖電壓,脈沖前沿和正弦液電壓過零點那一瞬時相重合。之后,將脈沖加給觸發器輸入端。在觸發器的輸出器產生新的脈沖,這脈沖寬度和傳感器軸的轉角成正比。在上述變換器的基礎上,為“列寧格勒機電工廠”聯合企業成批生產的工業機器人的規格化控制系統研制了具有匹配讀數的軸-數碼變換器。這種變換器位置測量精度是14位(在傳感器軸上)。 在采用限位器點位控制系統的機器人中應用的行程開關可以是微型開關無觸點行程開關、密封簧片繼電器(磁控接觸器)。 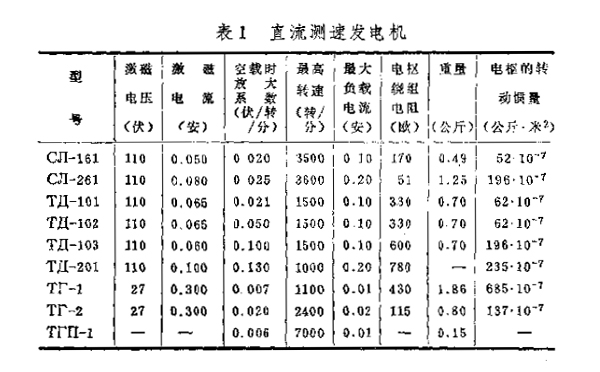 速度傳感器主要用在具有機電傳動裝置的工業機器人中,其目的是提高保持某一速度的精度和增強傳動裝置特性的硬度。速度傳感器多半是用直流測速發電機。表1給出了蘇聯產生的某些測速發電機特性。還要位置和速度傳感器合為一體的結構形式。日本的“三菱-八幡”噴漆機器人所用的十位光電數碼傳感器,為了產生速度信號,附有一長帶,其上均勻刻有4096條刻線。根據產生脈沖的頻率就可確定運動速度。 為了防止過載,機械手各環節上都裝有力傳感器,還有的以力傳感器按零件重量調節位移速度。通常是用應變儀傳感器作為力傳感器。在機器人機電傳動裝置中,常常根據電機電樞電流測量傳動裝置負載大小,以防止傳動裝置和機械手過載, 外部信息感受裝置用它獲得在控制機器人完成一定的生產操作過程時需要知道的外部環境狀態、性質和參數的信息。 所謂外界環境是指機器人工作區內生產環境,包括在此區域內的物體,如生產設備、機器人操作的產品、其它機器人和人等。 板材和扁平零件碼垛就是用外部信息感覺裝置的一個典型例子。在這種操作中,要求用裝在手爪上的接觸傳感器確定垛頂高度。 另一個例子是用機器人進行電弧焊。此時要求精確地保持焊縫和電焊條之間距離。由于焊件向兩邊撇開(它對產生質量影響不大),又因加熱時零件尺寸要求,所以實際上不能按預先設計的焊跡焊接。這就需要用專門裝置測量真實的焊縫位置,并且在控制焊條移動時考慮焊接的變化。 在抓取和運送易碎物品時,需要控制和限制物品的力,使它剛好不從手爪中滑落出來,這種工序要求手爪上安裝能測算手爪對物品壓力的感受裝置,并安裝顯示物體滑動的裝置。 最復雜的工序是機械裝配工序,需要用有知覺的機器人來完成。完成這樣的工序必須對裝配的零件進行精確地定位和定向。根據感受裝置得到的內部信息進行程序控制不能保證要求的裝配精度。所以機器人手爪上要安裝敏感元件。它能確定零件相對手爪或裝配在一起的其它零件的位置。精度可達到零點幾或零點零幾毫米。在裝配零件過程中,對施加的力度加以檢查,防止零件歪斜時把它卡住。這就要求在機器人工作機構上安裝測量力的感受裝置。  |

臺州捷眾智能裝備有限公司 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: m.gzfc168.cn 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾智能裝備阿里巴巴 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: jiezhongcnc.1688.com 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾微信公眾號 |  掃一掃手機網站 |